.PNG)
/ /AluminumCasting /MechContrSyst /ParametricSlicing /AluminumCarving /Thermodynamics /FEA /SPE3Dprinting /ElectricMotorcycle /3dPressureSensingHotend /PopsicleBridge /Ramjet /ModelSterling /3DPrintedDiscGolf /Bonsai /DamascusRing /Drawings /MetropolisFEA /Python /Ceramics
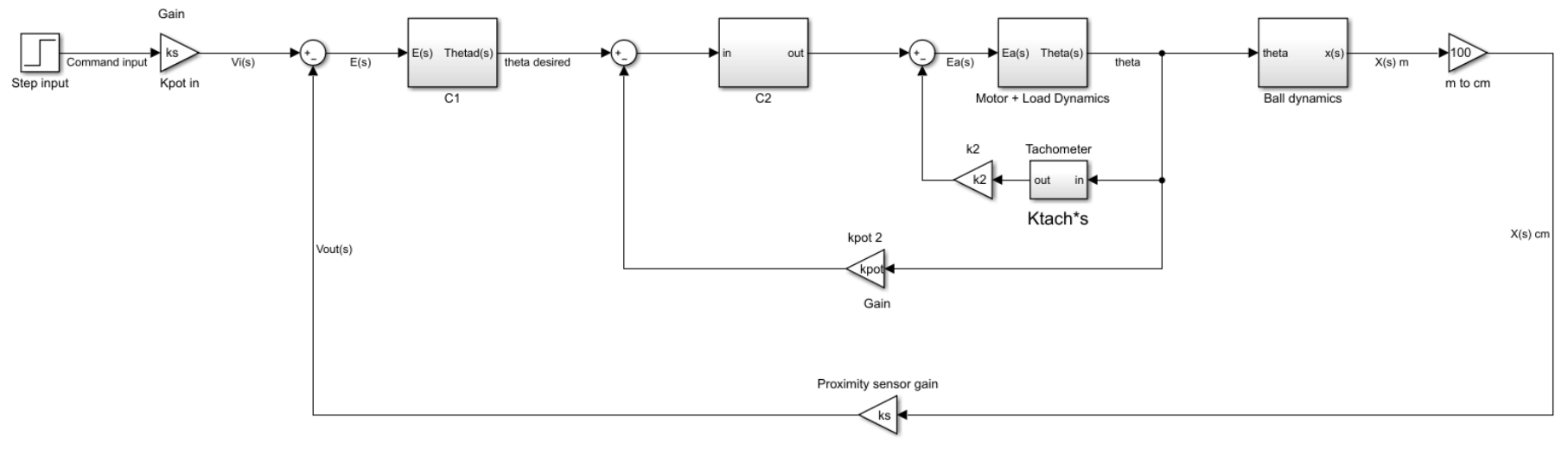
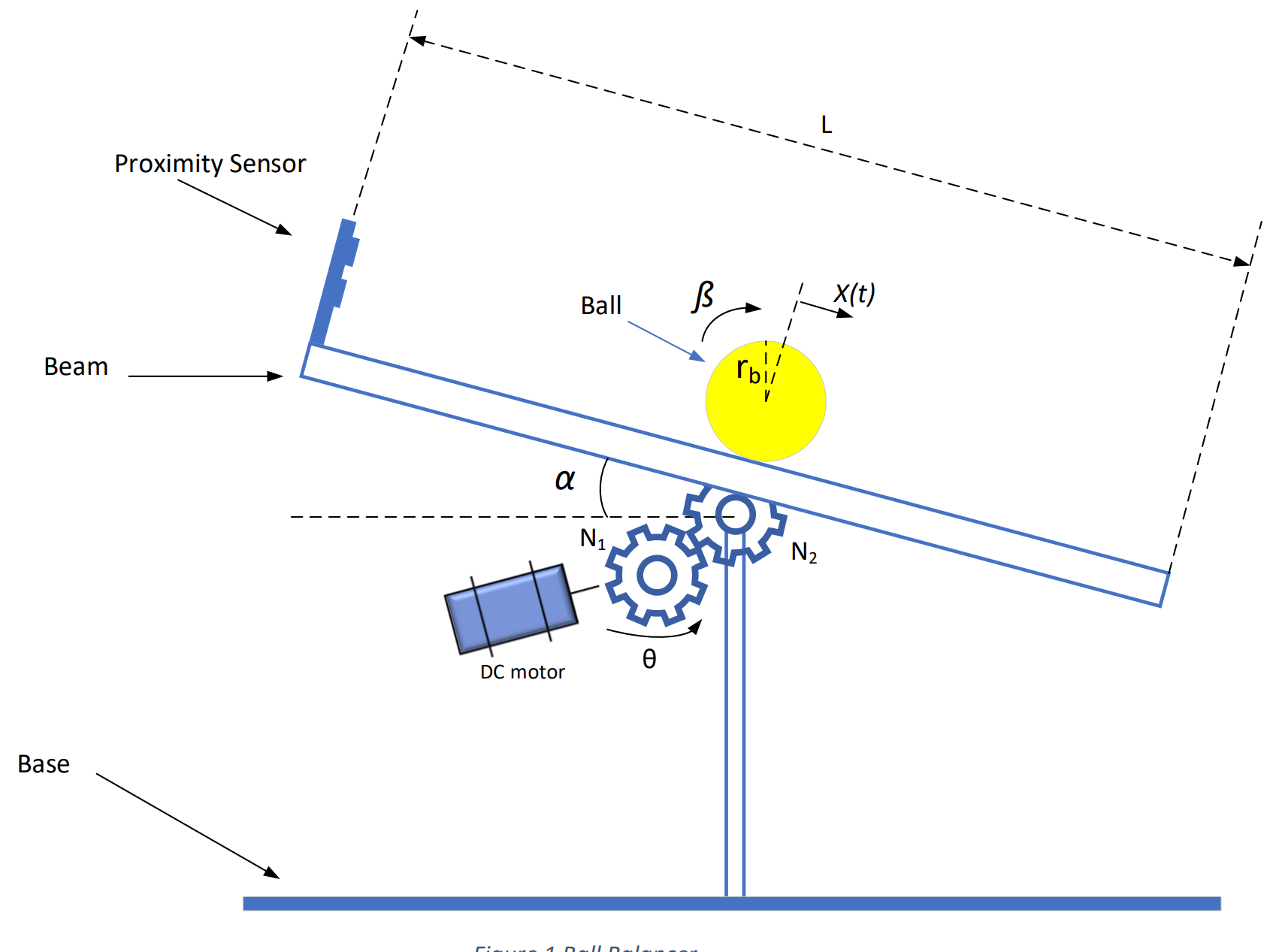
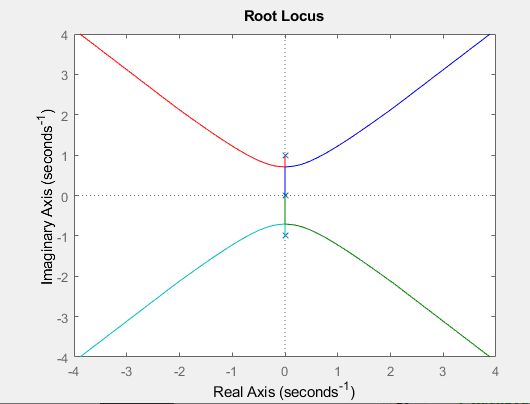
This is all about Mechanical Control Systems. This is one of the more interesting classes that I took in college. It is all about quantifying system responses and then tuning the whole system. An over damped or under damped system can be shifted to a critically damped system. The project for this class was a ball balancing system. This is similar to the types of controller that handle airplanes, electric hoverboards, and all sorts of things you might not expect. A system can be analysed by taking laplaces of differential equations as well as looking at the root locus. I really don't remember how to do it but I'm sure if I had to I could follow my notes to handle new systems. I'm hoping to dive into this topic more in depth to bring back my knowledge of the subject. Do you know what a PID is? how about gain or amplification? Well, I know that an unstable system can be tuned to be stable by varying the gains. The most important thing in the root locus is that if the lines go off to infinity your dead. Everything spirals out of control getting worse and worse till it all falls apart. A circular response is better. or something like that... You probably want to see my condensed transfer function don't you. Too bad, no-one gets to see that abomination but me. I miscalculated something and condensed it wrong so it wouldn't be accurate to the ball system so... nope. ;)
.PNG)
email: va.web.code@gmail.com https://github.com/va-code https://www.youtube.com/@vaughnanderson7984